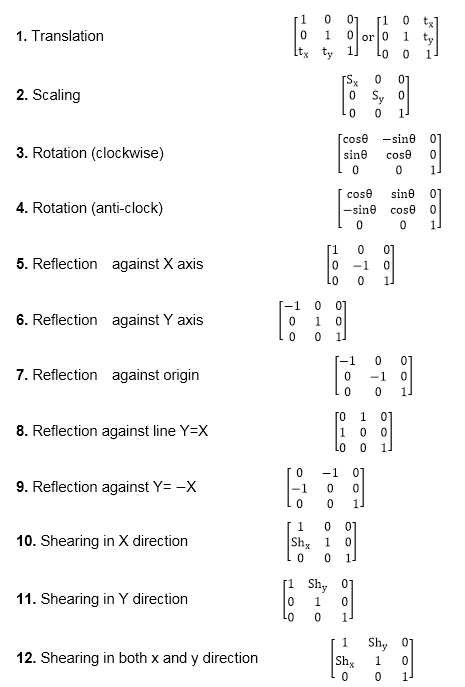
Design A Matrix Of Translation With Homogeneous Coordinate System

Coordinate Transformations In Robotics Matlab Simulink Mathworks Benelux Coordinates Circuit Design Transformations
Computer Graphics Homogeneous Coordinates Javatpoint

Transformation Using Matrices Geometry Transformations Mathplanet

3d World To First Person Transformation Geometry Of Image Formation Coursera
Homogeneous Coordinates Mike On Matlab Graphics Matlab Simulink

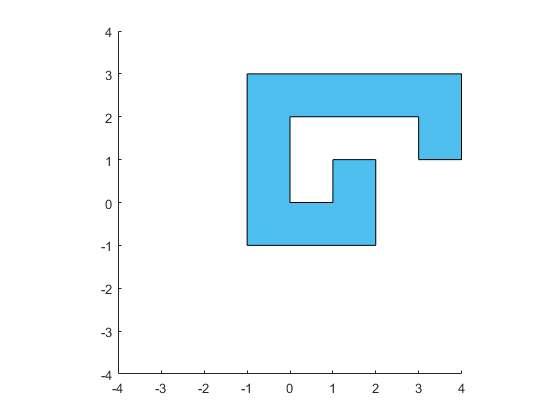
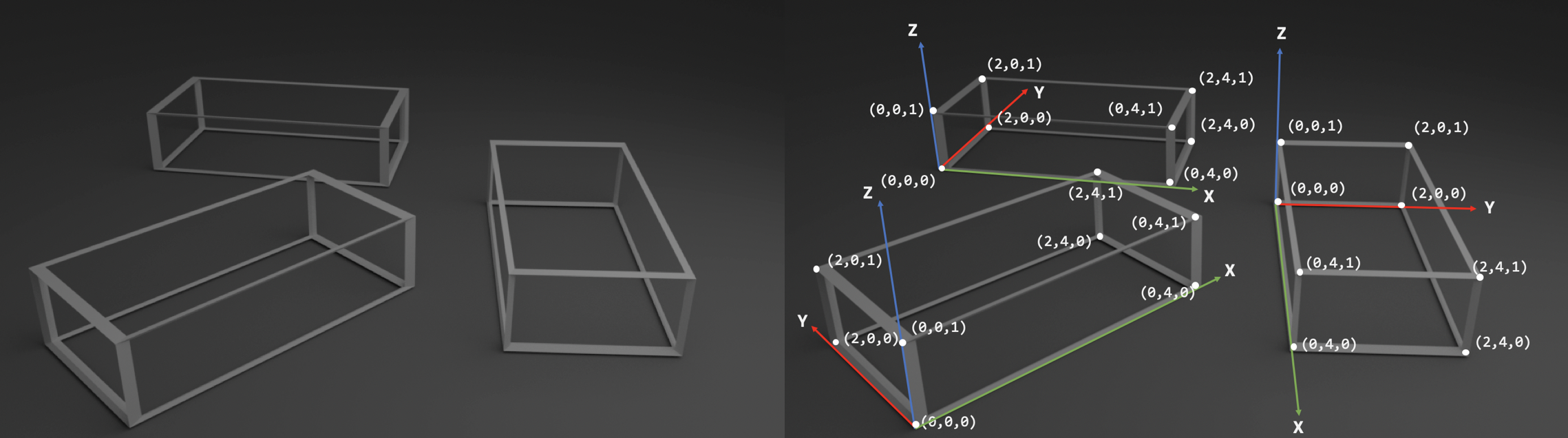
Points And Transformations
Hand origin basea 1 x 1 a 2 2a 3 x 3a 4 x 4a 5 x 5 hand origin where.
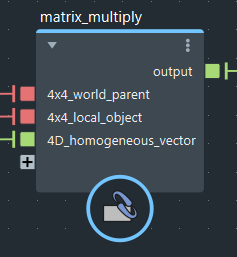
Design a matrix of translation with homogeneous coordinate system.

Vector Graphics Three Dimensional Homogeneous Coordinates A First Course In Electrical And Computer Engineering Openstax Cnx

Pbr Textures To Maya Arnold Renderman Vray Redshift Workflow By Aeolian Yang Pbr Maya Texture
B Sc Csit Computer Graphics Unit 2 By Tekendra Nath Yogi

2 2 3 Coordinate Transformations In 2 D Robotics Programming Study Guide
Changing Coordinate Systems To Help Find A Transformation Matrix Video Khan Academy
Http Home Iitk Ac In Jrkumar Download Me761a Lecture 203 20geometric 20transformation Pdf

Working With Matrices Apple Developer Documentation
Project 3 Camera Projection Matrix And Fundamental Matrix Estimation With Ransac
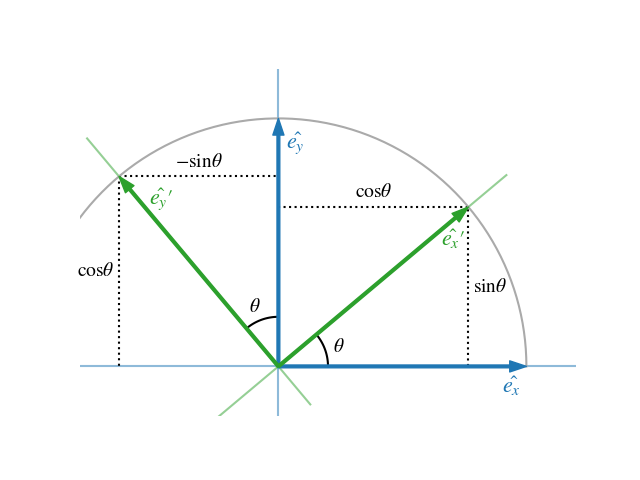
Creating A Rotation Matrix In Numpy
Transformation Matrices Reflection The Line Y X Examsolutions Maths Tutorials Youtube

The Print Guide Halftone Screen Angles Screen Printing Tutorial Screen Printing Diy Screen Printing
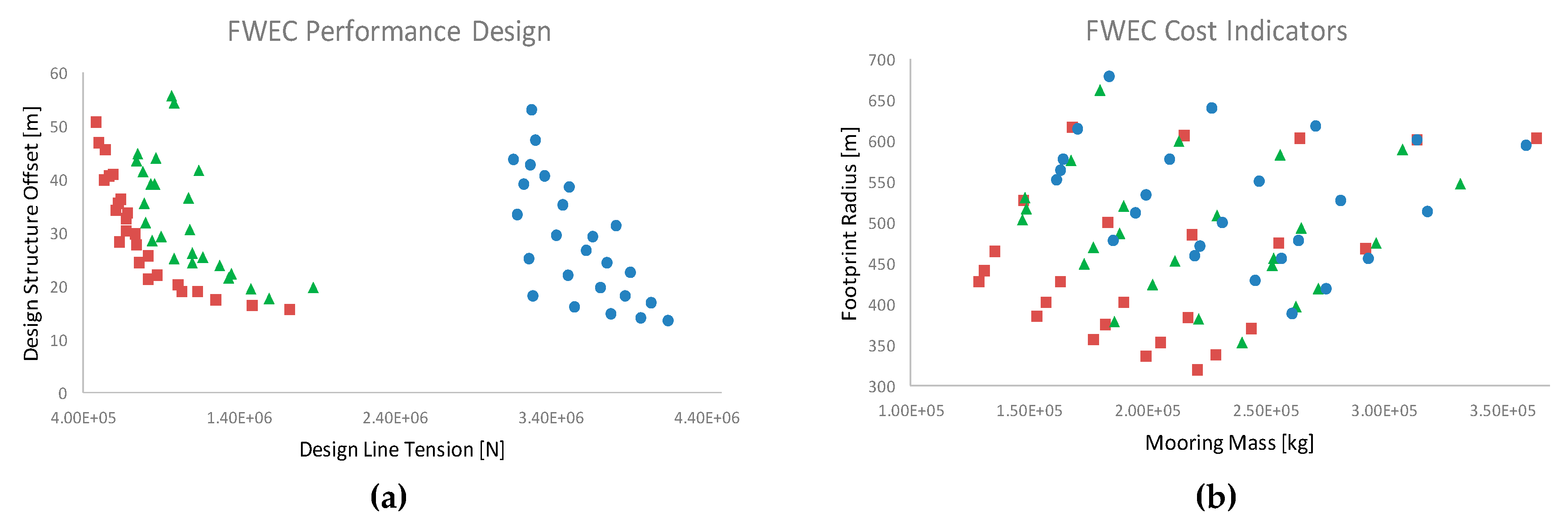
Jmse Free Full Text A Comparison Of Numerical Approaches For The Design Of Mooring Systems For Wave Energy Converters Html
Https Cseweb Ucsd Edu Classes Wi18 Cse167 A Lec3 Pdf

Build A 4 Dof Robotic Arm Part 2 Circuit Cellar
Https Scholarworks Uno Edu Cgi Viewcontent Cgi Article 3698 Context Td
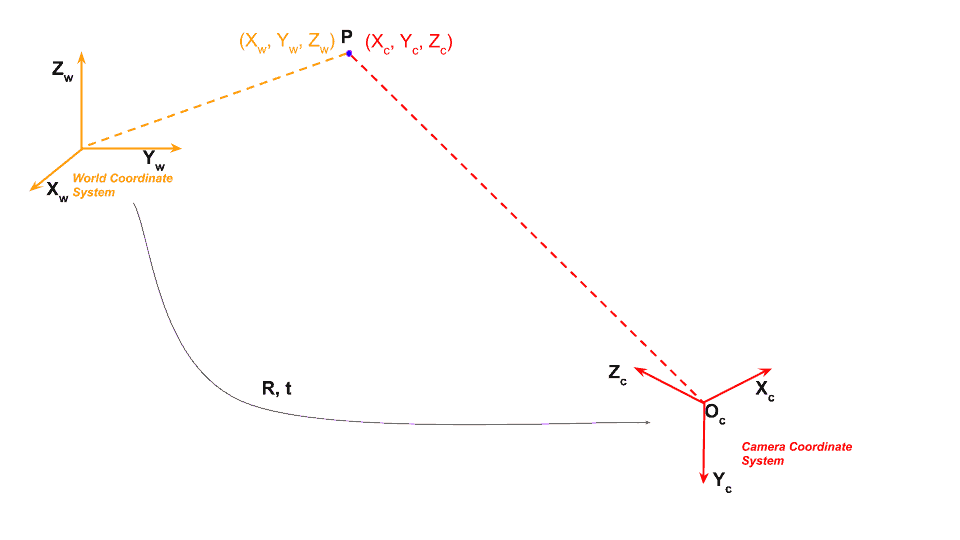
Geometry Of Image Formation Learn Opencv
Https Hal Archives Ouvertes Fr Hal 01964675 Document
Okjmys5ft6m Hm
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gctuk8 5s T69hckv3efyqrok42cufl0xdshivepbyjolzyin8fj Usqp Cau
Http Insightsoftwareconsortium Github Io Simpleitk Notebooks Python Html 21 Transforms And Resampling Html

Design Strategy And Issues Of The Delthaptic A New 6 Dof Parallel Haptic Device Sciencedirect
Https Ieeexplore Ieee Org Iel7 6287639 6514899 07895129 Pdf
Work With Matrices And Transforms Maya 2020 Autodesk Knowledge Network

Digital Microfluidics Wikipedia
Source : pinterest.com
